
Products/Applications 詳細
3Dプリンタがロボットにソフトタッチを与える方法
September, 12, 2024, Urbana-Champaign--イリノイ大学アーバナシャンペーン校(University of Illinois Urbana-Champaign)の電気およびコンピュータ工学、プロジェクトリーダー、Joohyung Kim教授は、「ロボットハードウェアは大きな力とトルクを伴う可能性があるため、人間と直接相互作用したり、人間の環境で使用する場合は、非常に安全にする必要がある。ソフトスキンは、機械的安全性のコンプライアンスと触覚センシングの両方に使用できるため、この点で重要な役割を果たすことが期待されている」と話している。
ソフトスキンカバーとタッチセンサは、人間との対話においてより安全で直感的なロボットの有望な機能として浮上しているが、高価で製造が困難。最近の研究では、熱可塑性ウレタン製のセンサを兼ねた柔らかい皮膚パッドを、3Dプリンタを使用して効率的に製造できることが実証されている。
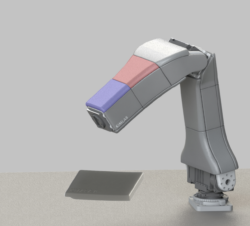
IEEE Transactions on Robotics誌で報告されているように、3Dプリントされたパッドは、ロボットアームのソフトスキンと圧力ベースの機械センサの両方として機能する。パッドには気密シールが付いており、圧力センサに接続する。圧迫された風船のように、パッドが何かに触れると変形し、押し出された空気が圧力センサを作動させる。
「触覚ロボットセンサは通常、非常に複雑な電子機器の配列を含み、非常に高価だが、機能的で耐久性のある代替品を非常に安価に作成できることを示した。さらに、3Dプリンタを再プログラミングするだけで済むため、同じ手法を様々なロボットシステムに簡単にカスタマイズできる」(Kim)。
研究チームによると、パッドが関節などの危険な領域の近くで何かを検知すると、アームが自動的に停止する、この機能を安全のために自然に使用できることを実証した。また、ロボットがタッチやタップを指示として解釈する操作機能にも使用できる。
![]()
